




标题:Matlab实时摄像头数据处理:技术解析与实战应用
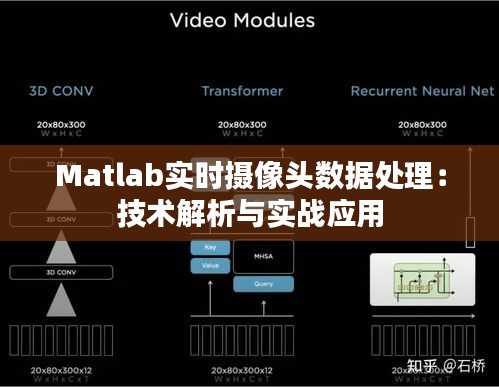
随着计算机视觉技术的飞速发展,实时摄像头数据处理在众多领域得到了广泛应用。Matlab作为一种功能强大的数学计算软件,在实时摄像头数据处理方面具有独特的优势。本文将详细介绍Matlab在实时摄像头数据处理中的应用,包括图像采集、预处理、特征提取、目标检测和跟踪等方面,并结合实际案例进行分析。
一、Matlab实时摄像头数据处理概述
- 图像采集
Matlab提供了丰富的函数和工具箱,可以方便地实现实时摄像头图像采集。通过调用videoinput函数,可以创建一个视频输入对象,并设置采集参数,如帧率、分辨率等。以下是一个简单的图像采集示例代码:
% 创建视频输入对象
vi = videoinput('winvideo', 'Device', 1);
% 设置采集参数
vi.FrameRate = 30;
vi.Resolution = [640 480];
% 开始采集图像
while true
% 读取一帧图像
frame = read(vi);
% 显示图像
imshow(frame);
% 按下Esc键退出循环
if isequal(get(gcf, 'CurrentCharacter'), 'esc')
break;
end
end- 图像预处理
图像预处理是实时摄像头数据处理的重要环节,主要包括图像去噪、灰度化、二值化等。Matlab提供了丰富的图像处理函数,如imnoise、rgb2gray、imbinarize等。以下是一个图像预处理的示例代码:
% 读取一帧图像
frame = imread('test.jpg');
% 图像去噪
denoised = medfilt2(frame);
% 灰度化
gray = rgb2gray(denoised);
% 二值化
binary = imbinarize(gray, 0.5);- 特征提取
特征提取是图像处理的核心环节,旨在从图像中提取出具有区分度的特征。Matlab提供了多种特征提取方法,如SIFT、SURF、ORB等。以下是一个使用SIFT特征提取的示例代码:
% 读取一帧图像
frame = imread('test.jpg');
% 初始化SIFT检测器
sift = SIFTDetector('NumFeatures', 500);
% 检测SIFT关键点
keypoints = detect(sift, frame);
% 提取SIFT特征
features = extract(sift, frame, keypoints);- 目标检测
目标检测是实时摄像头数据处理的关键环节,旨在从图像中检测出感兴趣的目标。Matlab提供了多种目标检测方法,如Haar特征、HOG特征等。以下是一个使用Haar特征的示例代码:
% 读取一帧图像
frame = imread('test.jpg');
% 初始化Haar特征分类器
faceDetector =Haarfeaturesubset('face');
% 检测人脸
bboxes = detect(faceDetector, frame);
% 绘制检测框
for i = 1:length(bboxes)
rectangle('Position', bboxes(i, :), 'EdgeColor', 'b', 'LineWidth', 2);
end
imshow(frame);- 目标跟踪
目标跟踪是实时摄像头数据处理的高级应用,旨在对检测到的目标进行实时跟踪。Matlab提供了多种目标跟踪算法,如卡尔曼滤波、粒子滤波等。以下是一个使用卡尔曼滤波的示例代码:
% 初始化卡尔曼滤波器
kalman = KalmanFilter('NumStates', 4, 'NumInputs', 1, 'NumOutputs', 2);
% 初始化目标位置
x = 100;
y = 100;
% 更新卡尔曼滤波器
[x, y] = update(kalman, x, y);
% 绘制目标轨迹
plot(x, y, 'r');二、总结
Matlab在实时摄像头数据处理方面具有丰富的功能和强大的工具箱,可以方便地实现图像采集、预处理、特征提取、目标检测和跟踪等任务。本文详细介绍了Matlab在实时摄像头数据处理中的应用,并通过实际案例进行了分析。希望本文对读者在相关领域的实践有所帮助。
转载请注明来自泉州固洁建材有限公司,本文标题:《Matlab实时摄像头数据处理:技术解析与实战应用》






 闽ICP备2021015086号-1
闽ICP备2021015086号-1